
2024
ROBOT
MK4i Swerve
L2 Reduction (6.75:1) // Falcon 500 Drive // 15 ft/s Free Speed
Under-Bumper
5 Roller Sets // NEO 550 5:1 // Chassis-Integrated Mount
Dual Flywheel
8×4" Colson Wheels // 2× Kraken X60 // 9" Gear Rack Hood
Linear Elevator
3:1 Falcon 500 // 13in Travel // 0.2s Full Cycle
Limelight
Speaker Auto-Aim // Distance Calibrated // Mounted Vantage Point
27"×32" Frame
1/8" Bellypan Pocketed // Battery Flat for Low CG // PDP on Pan
Linear Climb
UHMW Hook Carriages // 81:1 Gearbox // 24in Travel in 2s
Amp Wrist
108:1 Gearbox // Turntable Bearing // Trap + Amp Capable
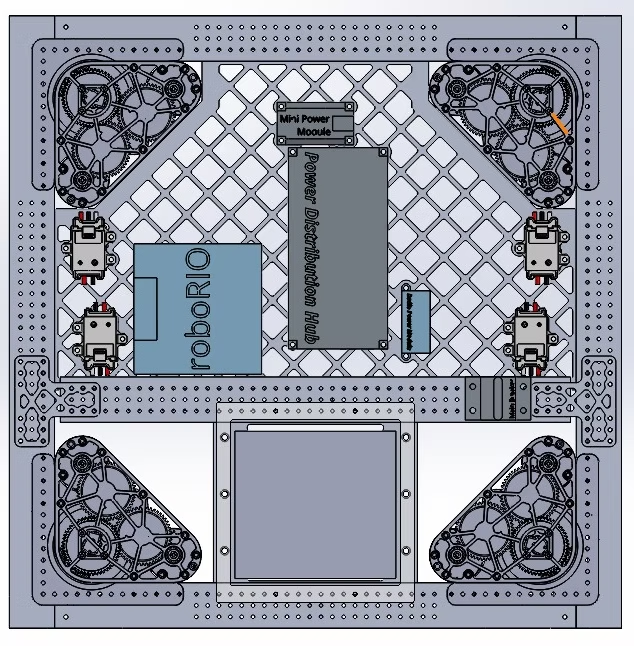
MK4i Swerve Drive
Four SDS MK4i modules running L2 gearing (6.75:1) with Falcon 500 drive and NEO steer motors give the robot full holonomic mobility at 15 ft/s. The 27" × 32" chassis uses an aggressively pocketed 1/8" bellypan, with the battery laid down flat for lower CG and more space up top. RoboRIO, PDP, and Swerve Spark MAX controllers are mounted on the bellypan.
Flywheel + Adjustable Hood
Eight 4" Colson wheels driven by two Kraken X60 motors launch notes at high linear speed from the shooter chamber. A 9" radius gear rack powered by a Falcon 500 through an 81:1 gearbox adjusts the hood angle in real time, enabling variable-distance speaker shots. A Limelight camera mounted at a fixed vantage point feeds distance data to the hood controller for auto-calibrated aiming.
Under-Bumper Intake
An under-the-bumper intake mounts directly to the chassis perimeter, keeping the note acquisition geometry low and protected. Five sets of 1.625" horizontal rollers — each with a polycarbonate tube and silicone sleeve — grab notes immediately on contact. A NEO 550 motor through a 5:1 reduction drives the rollers via HTD 5M pulleys and 20DP spur gears for reliable transfer into the shooter path.
Amp Grabber Wrist
A NEO 550 drives a 108:1 gearbox that rotates a 54T #25 sprocket bolted to the turntable — a large-diameter turntable provides strong attachment for the cantilevered application and prevents deformation. Bevel gears between the gearbox and sprocket allow compact packaging within the narrow carriage. The grabber uses 1.625" double horizontal rollers with a PC tube and silicone sleeve driven by a NEO 550 through a 3:1 reduction. A limit switch triggers when the note is acquired.
Stinger Elevator
A single Falcon 500 through a 3:1 set of 20DP gears drives the stinger, moving the amp wrist through 13" of travel in 0.2 seconds. 2×1×1/8" uprights are mounted to an angled pivot. Igus chain routes wiring along the carriage. Two physical limit switches define the range of motion, with a motor encoder for position tracking.
Winch Linear Climb
Linear rails are held to the chassis by two sideplates that are part of the robot truss structure. A C-channel connects the top of the rails as a crossbar. Hooks are mounted to UHMW plastic carriages. Two NEO 550 motors drive an 81:1 gearbox that outputs to a 1" OD drum, pulling flexible cable wire to move 24" in 2 seconds. The plate-standoff structure for the winch mounting is integrated into the chassis tube.