
2023
ROBOT
MK4i Swerve
L2 Reduction (6.75:1) // Falcon 500 Drive // 17 ft/s Free Speed
Cone & Cube
Rotate-Out Deploy // NEO 550 9:1 Pivot // 2" Roller Intake 3:1
Rack & Pinion
45:1 Gearbox // 80° Range of Motion // 1.2s Full Travel
Roller Grabber
8×3" Flex Wheels // 2× NEO 550 5:1 // Current Detect Confirm
Piston Stage
Inner Stage Deploy // Piston Actuated // Extra Scoring Reach
Spring System
6×10lb Constant Force // Pivot-Mounted // Passive Load Offset
Landing Gear
Lead Screw Deploy // NEO 550 81:1 // Platform Balance Climb
30"×30" Frame
1/8" Bellypan Pocketed // Battery Offset CG // Sparkmax on Pan
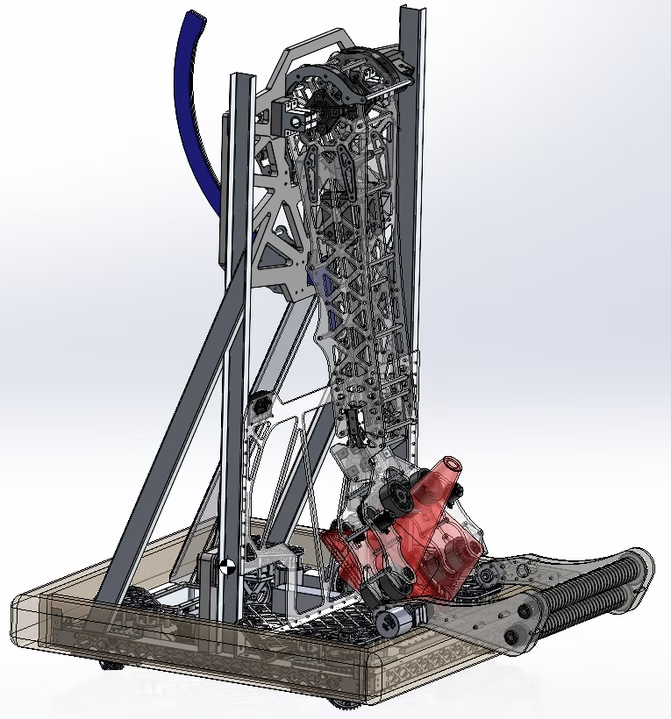
MK4i Swerve Drive
Four SDS MK4i modules running L2 gearing (6.75:1) with Falcon 500 drive and NEO steer motors give the robot full holonomic mobility at 17 ft/s. The 30" × 30" chassis uses an aggressively pocketed 1/8" bellypan with the battery offset to one side for CG balance. RoboRIO and Swerve Spark MAX controllers are mounted directly to the bellypan.
Rack & Pinion Arm
A NEO 550 drives a 45:1 gearbox that meshes with a #25 chain bolted to an arc-shaped metal rack, rotating the arm through 80° of motion in 1.2 seconds. Six 10 lb constant-force springs mounted near the pivot serve as a passive counterbalance. Two PC side plates with standoffs provide impact resistance, and Igus chain routes wiring along the arm structure. A physical limit switch defines the home position.
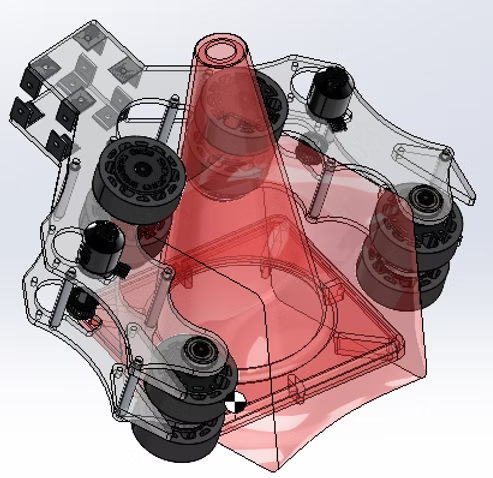
Cone & Cube Intake
The ground intake mounts directly to the chassis perimeter and rotates outward to deploy. Two NEO 550 motors through a 9:1 gearbox direct-drive the pivot shaft to rotate the intake out. A separate NEO 550 powers two 2" rollers through a 3:1 reduction via pulley and gear, either grabbing the cone flange or passing a cube through into the grabber. A PC plate and standoff structure houses and protects the power transmission.
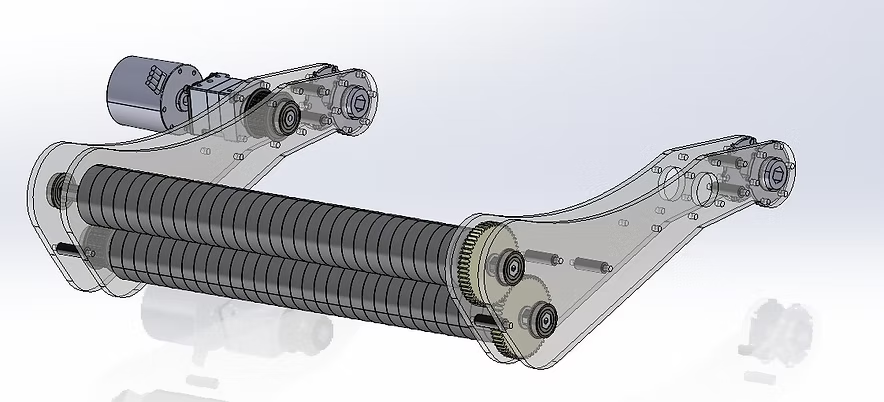
Roller Grabber
Eight staggered 3" flex wheels — 1" tall — grip both cones and cubes for intaking and outaking. Two NEO 550 motors through a 5:1 reduction drive the wheels via HTD 5M 9mm pulleys. A 1/4" polycarbonate plate and standoff structure houses the power transmission and wheel geometry. Current control triggers when a cone or cube is acquired, confirming capture without a dedicated sensor.

Piston Inner Stage
An inner stage housed inside the pivot arm deploys via piston actuation to extend reach during scoring. This allows the arm to address all grid levels without repositioning the base. Igus chain routed through the arm enables smooth wire motion during both arm rotation and piston extension.
Landing Gear Climb
A landing gear-style lead screw actuates downward to deploy, guided by a linear rail screwed onto a nylon block mounted to the chassis and truss. The robot drives onto the charge station ramp with half its frame hanging off the edge, leaving room for two alliance partners. A NEO 550 through an 81:1 reduction powers the lead screw, while a separate NEO through a 9:1 reduction powers wheels on the landing gear feet.